
全国免费咨询热线
0316-5789130
免费咨询热线
0316-5789130作者:许昌瑀(西湖大学博士后);林洋伊(西湖大学学生);姜汉卿(西湖大学机械工程讲席教授)
冰冷坚硬的金属骨架、精确运转的齿轮电机……这,是不是你脑中的“机器人”?其实,还有一种机器人:它们没有坚硬的躯壳,而是以柔软的身体探索世界,它们并不强壮,却不会轻易损坏——这,就是软体机器人。它们像章鱼、蚯蚓、水母等自然界生物一样灵动,能够弯曲、伸展、钻入狭缝,展现出前所未有的环境适应力。
传统机器人几乎都以金属或硬质塑料为骨架,依靠电机、齿轮、连杆等关节式结构来运动。它们动作精确、重复性强,能够在流水线上昼夜不停地完成焊接、装配、搬运等任务,是现代工业中高效的“钢铁工匠”。然而,在复杂多变、不可预期的环境中,它们往往动作僵硬,难以灵活应对:一个机器人手臂或许能精准焊接汽车零件,却很难像人手一样轻柔地剥开一枚鸡蛋。
软体机器人不一样!它们的制造灵感来源于自然,犹如柔软的“仿生舞者”——摒弃了刚硬的外壳,采用硅橡胶、弹性聚合物、凝胶乃至生物组织等柔软材料制造,身体能够自由弯曲、伸展、收缩、扭动,具备穿越狭窄空间、贴合不规则表面,甚至在极端环境下完成任务的能力。
这种柔软的特性,也让软体机器人更适合与人直接交互。例如,“肌肉骨骼型”仿人机器人,以类肌肉的柔性结构提升互动的自然性;可变刚度柔性机械臂,则能在“刚”与“柔”之间灵活切换,在保障安全的同时贴合人体动作完成协作,让人机关系变得更和谐。
近年来,我国科研团队在软体机器人研发方面不断推出新成果。如上海交通大学研制的仿蛇机器人,能在狭窄通道中蜿蜒前行;哈尔滨工程大学研制的仿鱼机器人,能在深海高压中稳定游动;中国科学技术大学和西湖大学等研制的柔性抓手,能夹起各种形状的物体……这些尝试都指向同一个方向:让机器人在复杂环境中更灵活、更适应。
在实际应用中,软体机器人与双赢彩票 双赢彩票网站传统机器人互为补充,二者通过刚柔融合与系统集成走向协同,正在极大地拓展机器人的应用边界,为未来带来无限可能。
没有电机和齿轮,软体机器人是如何动起来的?其奥秘在于科研人员通过多种“人工肌肉”形成独特的驱动方式,赋予机器人弯曲、伸展与蠕动的能力。
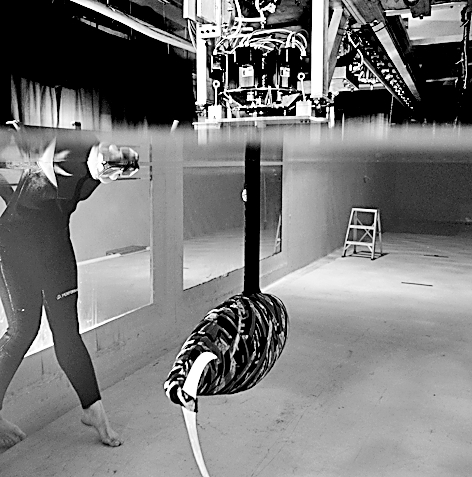
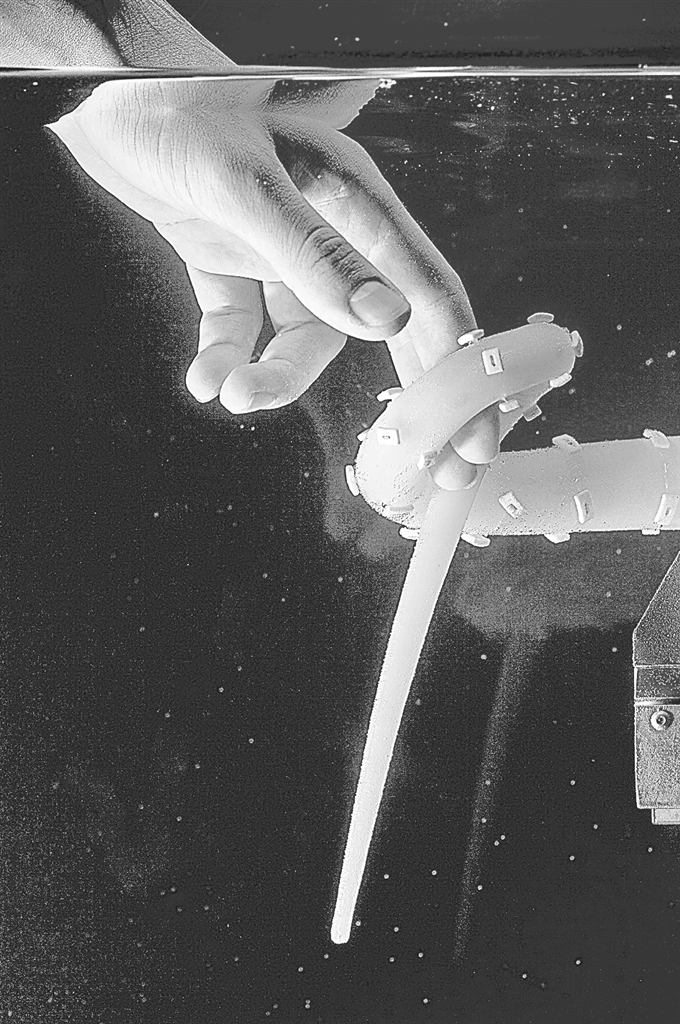
气动驱动是软体机器人最经典的运动方式。机器人体内布满各种精巧的空腔和通道,当空气或液体被泵入时,这些腔体就像肌肉纤维一样膨胀、弯曲,驱动身体伸展或扭动。只要精准调控不同腔体的压力和充气顺序,机器人就能完成爬行、夹取甚至翻滚等复杂动作。它就像一个“会呼吸”的身体,靠气流推动全身舞动。近期,荷兰原子与分子物理研究所展示了一种基于气流的软体机器人,仅靠一根硅胶软管,在气流作用下就能自发振荡,并通过与环境的互动展现类似动物的步态。这一设计无需复杂电路,却能让机器人在动态环境中保持适应性。
电驱动软体机器人中,最典型的是介电弹性体驱动(DEA),在柔软的高分子薄膜两侧覆盖柔性电极,施加高电场后产生静电应力,使薄膜厚度被压缩、平面方向膨胀,从而实现快速而有力的伸缩。清华大学科研团队曾利用这一技术研制出亚厘米级的软体蠕动机器人,能在狭窄管道中高速前行并完成巡检;哈佛大学的研究则将多层介电弹性体驱动应用于微型扑翼,让机器人实现轻盈飞行。另一类是离子聚合物驱动,依靠电场作用下的小离子在聚合物电解质中迁移并携带水分子,造成两侧体积差异,从而引起整体弯曲,其动作相对缓慢,但优势是驱动电压极低,与现有锂电池等便携电源技术高度契合,在实际应用中潜力突出。西安交通大学团队就利用这一原理,设计出“扭转—弯曲”双稳态结构,并驱动微型机器人实现自主爬行与游泳,为低电压软驱动的应用拓展提供了新思路。
形状记忆材料是一类特殊的“热驱动肌肉”,包括形状记忆合金(SMA)和形状记忆聚合物(SMP)。这类材料的独特之处在于能够“记住”原始形态,加热时会恢复到设定的形状,冷却后则可以再次被变形并固定。将细丝状的形状记忆合金或柔性的形状记忆聚合物嵌入软体结构,就好比在“橡胶肌肉”里埋进了热响应的纤维,每次通电或加热,它们都会收缩或恢复形状,从而牵引机器人完成动作。
外场驱动软体机器人的代表是磁场驱动,在柔软材料中掺入微小的磁性颗粒,通过外部磁场操控,使其在力和力矩作用下带动整体结构弯曲或蠕动。麻省理工学院团队研发的毫米级直径的柔性连续体机器人,能在复杂血管模型中灵活导航。外磁场能够无损穿透人体组织,适合医疗应用。当前,磁驱动机器人已经在动物实验中展现了进入血管、胃肠等复杂环境的潜力。
外场驱动软体机器人的另一类型是光场驱动。在材料中引入光响应分子或光热颗粒后,利用激光或可见光远程触发其弯曲、伸展甚至扭转。光场的空间分辨率极高,可以实现局部精确控制,便于结合光纤用于微创场景中。不少研究团队已开发出精准可控的光驱动软体结构,比如液晶聚合物(LCP)动态响应材料,能够在光照下进行弯曲、滚动、扭转,甚至模拟“光控步双赢彩票 双赢彩票网站行”。还有研究通过将光吸收晶体与聚合物复合,制成可在紫外与可见光交替照射下快速弯曲并恢复的光控薄膜,可以模拟“光控夹持”动作。
电磁弹性体驱动软体机器人是西湖大学科研人员发明的全新驱动方式。它的原理就像一场“拉锯战”,一边是橡胶般的弹性体在努力拉伸,另一边是磁铁之间的吸引力在不断牵引。当没有电流时,两股力量保持平衡,结构处于自然状态;一旦通电,磁力突然增强,会把弹性体“拉近”,像肌肉纤维一样收缩起来,通过调节电流大小,便能控制收缩的幅度和速度。不同于传统的电磁驱动,该机制以软磁和硬磁之间的强磁吸引为主要驱动力,不仅能输出较大的力量,还能在很低的电压下稳定工作,更可以通过巧妙设计,在断电后保持某种形态而不耗能。利用这一原理,该科研团队已经研发出能够在自然环境中爬行、游泳甚至跳跃的微型机器人,为未来小巧灵活、真正自主的软体机器人提供了新思路。
直接利用活细胞作为驱动源,是近年来软体机器人发展的新方向。科研人员将心肌细胞或骨骼肌细胞培养在柔性材料上,让它们像在体内一样有节律地收缩,从而驱动软体机器人运动,这样的机器人仿佛真的“长”出了能跳动的肌肉。与其他驱动方式不同,这些细胞不仅能自主消耗营养液产生能量,还具备一定的自愈能力。更有研究通过基因改造,使细胞对光信号产生反应,只需一束光照,肌肉便会收缩,实现精准的“光控指令”。这让软体机器人距离真正的仿生生命体又近了一步。
无论采用何种驱动方式,软体机器人都离不开柔软材料的支持——硅胶、橡胶以及新型高分子材料。它们就像软体机器人的“肌肤”,既具有柔韧性又可大幅变形,为各种驱动方式提供了可靠的舞台。正因有了这层“柔性肌肤”,软体机器人才能在复杂多变的环境中自由伸展、弯曲与贴双赢彩票 双赢彩票网站合,展现出传统机器人难以企及的环境适应性。
“入境随形”是软体机器人的最大魅力。无论是微观世界、极端环境,抑或是人机交互的日常生活场景,软体机器人总能找到属于自己的任务“路径”,像水一样贴合、渗透、适应复杂环境。如今,软体机器人正逐步走出实验室,在真实世界中大展身手。
在医疗领域,纤细的软体机器人能够进入人体内蜿蜒的血管或胃肠道,避开敏感组织,抵达手术刀难以触及的病灶,完成精准操作而不划伤脆弱的组织。未来,这类机器人甚至可以设计为可降解材料,在完成任务后逐渐分解,被身体吸收,避免二次取出。近年来,我国科研人员已经开展了基于磁驱动的胃肠道软体机器人研究,并在动物实验中展示了其可行性,为微创医疗带来新的可能。
在灾害救援与环境探测中,一种能够钻入狭小缝隙的软体探测器,不仅可以在地震废墟中寻找生命迹象,还能携带微型传感器,监测温湿度或有害气体,在复杂空间内完成信号检测,为救援提供关键信息。如浙江大学的仿生鱼类机器人已成功潜入万米深海,在高压环境中稳定游动,其柔性抓手可在深海完成取样任务。
不同于冰冷的机械臂,在日常的人机交互中,软体机器人拥有温和的触感,既可为老人提供辅助护理,也能成为教育场景中的互动伙伴。近年来,一些具身智能机器人企业也开始研发可变刚度的软体手臂,既能在需要时提供支撑力,又能在接触人体时保持柔软安全,展现出高度的亲和感,成为陪伴、守护人类的温柔伙伴。
首先是驱动与材料性能的限制。与传统电机相比,软体驱动输出力量较小,而许多智能材料工作条件苛刻,例如高电压或特殊外场。此外,软体材料在大变形时往往表现出显著的非线性特性,加之制备工艺尚未标准化,使得性能稳定性和重复性难以保证。虽然近年来出现的新型电磁弹性体驱动软体机器人在输出力和驱动条件上取得了突破,为软体机器人带来“肌肉”般的力量,但要真正实现模块化、工程化应用还需要时间。
其次是控制精准度有待提高。与关节分明的传统机器人不同,软体机器人的整个身体都能变形,拥有几乎无限的自由度。这一特性带来了灵活性,也让运动控制和传感感知变得格外复杂。如何让它们既能像生物一样顺应环境,又能稳定、可靠地执行任务,是科研人员正在攻克的难题。
最后,能源与系统集成亟待突破。相比传统机器人,软体驱动器与现有电子、能源和制造体系存在一定“不兼容”,小型电池、芯片和控制电路尚难与柔性驱动单元顺畅集成。整体上,软体机器人距离真正的自主化和工程化应用还有很长的路要走。
挑战并非阻碍,而是未来的路标。我们可以更大胆设想,随着新材料和智能算法的发展,未来的软体机器人也许能感知、思考与反应,逐渐进化为一种“柔软的智能生命”。
未来五年学什么|抗磁扰、低功耗、快写入,自旋存储技术为集成电路带来新希望
工业和信息化部等五部门近日印发《关于加强信息通信业能力建设支撑低空基础设施发展的实施意见》。加强监管能力体系建设,规划无人机专用号段,推动“一机一码一号”能力建设,探索标识解析在无人机领域的应用,形成无人机通信资源精细化管理。
全球森林逐渐被快生树木主导,而稳定生态系统的慢生树种正在消失。“我们关注的是极为独特的物种,它们主要集中在生物多样性丰富、生态系统联系紧密的热带和亚热带地区。“此外,在现在和未来受到干扰的地区,非本地物种可能会加剧对光、水和养分的竞争,从而使本地树木更难生存。
中国科学院动物研究所研究员王红梅带领的“灵长类胚胎发育的规律解析与体外模拟团队”,用27年的接力攻坚,把灵长类早期胚胎发育这个看不见、摸不着的“黑匣子”,变成了清晰可见的“生命剧本”。
截至1月28日,“横竖都是世界第一”的贵州花江峡谷大桥累计接待游客突破130万人次,通行车辆超20万辆次,持续为区域发展注入新动能。大桥带来的发展溢出效应令人瞩目,而深入大桥肌理探查,你会发现,支撑起这座庞然大物的每根细钢丝,全部都是“中国造”。
针对常见的饮食误区,杨爱明特别提醒,不建议采用“不吃主食”或“用水果代替主食”的方法来控制体重。对于肠胃功能较弱的人群,应避免过冷、过烫、过辣、过咸食物的刺激,切忌暴饮暴食,并尽量保持规律的进餐时间,以防加重原有胃肠问题。
近日,市场监管总局(国家标准委)批准发布《中医体质分类与判定》推荐性国家标准。
聚集相关企业300余家,机器人产业链规模超百亿元……北京亦庄,为何扎堆这么多机器人企业?
“十四五”时期,我国全社会研发经费投入年均增长10%,研发经费投入强度提高0.44个百分点。
日前,我科研团队在国际学术期刊《科学》发表论文《多尺度泛基因组图谱赋能混合倍性甘蔗的基因组解析》,为甘蔗高产优质育种提供了全新“基因资源地图”与核心分析工具。
日前,南海区域海-气双向耦合智能大模型“飞鱼-1.0”在广东广州正式发布。“
这声呼唤,穿越漫双赢彩票在线购彩 双赢彩票平台长岁月,凝结着人类对这位地球近邻永恒的好奇与梦想。而今,随着新一轮探月热潮在全球兴起,这句“去月球”已不再仅仅是浪漫的诗意表达,更成为科技前沿竞相追逐、国家实力与创新精神交汇的生动实践。
特种机器人技术与数智系统创新团队成员张平点击一键启动指令后,雷达驱动、定位算法、规划与控制算法等模块被加载。在系统支持下,无人机能够精准定位、自主导航与实时避障,像一位不知疲倦的巡检员。
深耕西南高原山区二十余载,于富强与真菌为伴,在种质资源保护与产业富民之间架起桥梁,把论文写进泥土中,把科研做进农户的大棚里。3年间,于富强往返昆明与水城数十趟,硬是帮着水城从零起步,建成了食用菌研究所、日产50万袋的菌种厂和鲜菇冷链物流集散中心。
研究团队将这一环境效应与黑洞双星轨道偏心率的演化同时纳入统一模型,并将理论预测与北美纳赫兹引力波天文台合作组15年的观测数据进行对比分析。陈一帆表示,尽管当前的不确定性仍然较大,但该研究已经表明,引力波观测开始携带关于星系中心环境的可测信息。
近日,国家管网集团西部管道公司成功完成所辖新疆段天然气、原油、成品油管道输送全生命周期碳足迹核算,获得中国质量认证中心颁发的“产品碳足迹证书”。
近日,中国农业科学院蔬菜花卉研究所蔬菜分子设计育种创新团队研发出新型植物基因研究工具——对目标DNA序列的邻近空间蛋白标记系统。
因为像了解自己的孩子一样了解黑土地,韩晓增有个外号——“黑土地的营养搭配师”。他带领团队精心配制出一套营养搭配的“秘方”。
蚊种与病毒之间存在高度匹配关系。1901年,公共卫生与热带医学领域先驱沃尔特·里德证明,蚊子是传播黄热病的元凶。科学界传统观点认为,病毒以颗粒形式在蚊子体内传播,却始终不知道真正的“病毒受体”是什么。
科技创新和产业创新的深度融合,不仅是构建现代化产业体系的战略举措,更是贯彻新发展理念、推动高质量发展、加快构建新发展格局的重要抓手。
Copyright © 2024 双赢化工产品有限公司 备案号:冀ICP备17004840号 冀公网安备13102502000441号


